摹 摹 脉 在 在 å¤šæ ·æ€§ å¤šæ ·æ€§ å¤šæ ·æ€§ å¤šæ ·æ€§ å¤šæ ·æ€§ å¤šæ ·æ€§ å¤šæ ·æ€§
Model training (learning) ANFISSOCTtTe+Tw ANFIS based HEV control system We have established a control system model such as. There are common problems in engineering and many technical fields: For a certain multi-input multi-output system, a large amount of relevant data has been accumulated, but the internal complex nonlinear relationship cannot be determined. Therefore, when a new set of input data is applied to the system, the corresponding output cannot be obtained. For this reason, the neural network needs enough samples to be trained so that the correct mapping from the n-dimensional input space to the m-dimensional output space can be completed when the network is running (testing). In addition, because neural network learning does not always converge in the optimal direction, a reasonable choice of sample size is required. The choice of the number of samples to consider the network error, when the increase in the sample network error will decrease; but reduced to a certain extent, with the increase in the number of samples the network error will increase, the relationship as shown. First, assume a parameterized model structure (this parameterized model associates membership functions of input variables and input variables, fuzzy rules, membership functions of output variables and output variables, etc.) and then obtains a set of input/output data. Combine the training data of the anfis algorithm according to a certain format. Here, five membership functions are selected to train the established ANFIS model. After 100 trainings, the final root-mean-square error is 0.00424.
Model Testing and Verification In general, the validation of the resulting model uses input/output data that is not used for training to compare whether our trained models can match and predict these data pairs. The matching data between the training data and the model structure can be judged by checking (checking) the data. We verify the model of the five membership functions by using the training error and the calibration error. It can be seen from the above that the training system's matching data is basically consistent with the training data. The error of the checking data is also relatively small, and decreases with the increase of the number of iterations. It can be seen that the selected system model is effective.
Analysis of membership function optimization results In the above model training process, the membership function we chose was bell type. The training input variable tT and the battery SOC membership functions are shown in Figure 8 respectively. The solid line represents the pre-training membership function, and the dotted line represents the trained membership function.
The membership function before and after the input variable SOC training before and after the input variable tT membership function can be seen from the membership function in the middle position than the widening of both sides, that is, the engine works in the vicinity of the optimal curve of the membership function widens, therefore, This membership function is optimized. In this case, since the battery SOC is often operated between 0.3 and 0.8, the membership function in this interval is significantly broadened.
Optimize the target simulation analysis To verify the effectiveness of the optimization model, ADVISOR software was used to simulate the entire vehicle. This paper selects the urban road cycle UDDS developed by the EPA of the United States Environmental Protection Agency as the road cycle to simulate the hybrid car. The UDDS has a total journey of 20km, a time of 1369s, a maximum speed of 91.25km/h, an average speed of 31.51km/h, and a total of 17 stops during the journey. The engine uses a 376 gasoline engine with a displacement of 0.993 liters. The motor system uses a permanent magnet brushless DC motor with a rated voltage of 144V, a minimum voltage of 60V, and a maximum current of 400A. The battery system uses a nickel-metal hydride battery pack and weighs 72kg. Simulation parameters such as
SQR-HEV Main Simulation Parameters Parameter Name Parameter Value Engine Power 40KW/3900r/m Motor Power 10KW/6000r/m Battery Maximum Capacity 28Ah Total Vehicle Mass 1150Kg Wind Resistance Factor 0.3 Windward Area 2m2 We put the optimized ANFIS model into the vehicle Simulations are performed in the simulation model, and the resulting engine output torque and motor output torque are shown as 10 and 1, respectively.
0UDDS cycle under the engine output torque 1UDDS cycle under the motor output torque from the engine output torque can be seen, the optimized fuzzy logic control can achieve the engine running in the higher torque range (40 ~ 60Nm), in this The engine fuel economy in a region is better. Seeing from the output torque of the motor, when the motor is in the auxiliary driving state, it provides a small driving torque; when the motor is in the regenerating state, most of the energy can be recovered, so that the battery power can be provided by the motor without using fuel for the battery. Charging. Therefore, the torque distribution strategy has achieved satisfactory results.
The background and signification of research this program
As plastic has been used for all other industry widely, they are playing an important role in the development of our economy, but plastic did not easy to broken after being used and it becomes a big pollution for our environment .Therefore it is urgent to process those waste material without pollution.
In addition ,as the fastest development of world economy ,the shortage of petroleum will be urgent more and more .even the expert had stated that it will have no petroleum recover in earth after 15 years later, so searching the new resource becomes an issue which is concerned by all the countries of the world.
so it have great meaning of settle this program ,which can recycled waste material like plastic into resources without any pollution.
1.Working process Of waste plastic Pyrolysis Plant:
First, the raw materials are put into the reactor, and then seal the feeding in door, later start the machine and the reactor will be rotating and heated by coal, natural gas, wood or electricity. When the temperature reaches the degree of 250 to 280, we will get the crude oil, the oil steam will be continuous produced until the temperature reaches 350-460 C; oil steam will flow through oil gas separator, light component will enter the condensers and meanwhile the heavy oil will be discharged automatically into in heavy oil tank. The liquefied part will be condensed as crude oil, and the part which cannot be liquefied will be transferred by the water seal back to the burning chamber to be reused as heating material.
2. Model of waste plastic Pyrolysis plant:
|
Model |
Reactor size |
Material |
Handling capacity |
Weight |
Seaworthy packing |
|
LJ-8 |
2200*6000mm |
Q245R boiler steel plate |
5 tons |
24tons |
2*40HQ |
|
LJ-9 |
2200*6600mm |
Q245R boiler steel plate |
8tons |
26tons |
2*40HQ |
|
LJ-10 |
2600*6600mm |
Q245R boiler steel plate |
10tons |
30tons |
1*40FR+1*40HQ |
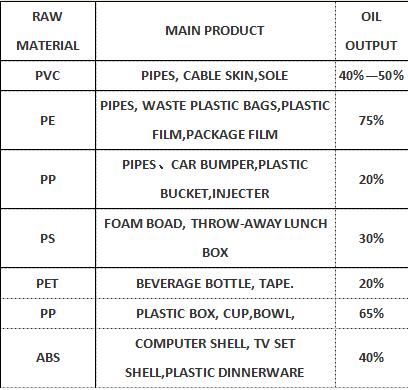
3. Plastic Oil output reference: 20%~75%
4. Installation: We will be in charge of arranging our engineer to go to your place to guide the installation and train your workers how to operate the waste plastic pyrolysis plant,and buyer will be in charge of the food, accommodation and round air tickets.
5. Land requirement: 300sq meters(10m*30m)
6. Exporting Experience:
|
America: |
Brazil, Canada, Colombia, USA, |
|
Middle East: |
Dubai, Iran, Jordan, Saudi Arabia, Turkey |
|
Europe: |
Albania , Bosnia and Herzegovina |
|
Asia: |
Afghanistan, India, Malaysia, Pakistan, Philippines, South Korea, Vietnam, Myanmar |
|
Africa: |
Ghana, Mozambique, Zambia |
Waste Plastic Pyrolysis Plant,Full Automatic Waste Plastic Pyrolysis Plant,Oil Distillation Plant,Rubber Refining To Oil Plant
Shangqiu Sihai Energy Technology Co., Ltd , http://www.sihaienergy.com